微位移装置是指在外力或者电场、磁场等作用下,直接或间接由微结构杠杆放大产生精密微量移动,实现精密定位的装置,例如采用压电陶瓷的逆压电效应、由电压控制产生微位移蠕动。以干涉仪中移相器为典型微位移装置代表,总结多年来科研工作中对微位移装置伸长量的测量与在线标定方法,实现了干涉仪中步长为 λ /8( λ = 632. 8 nm) 的准确移相; 通过研究基于电容器件的位移反馈,实现了分辨率优于 10 nm 的精密定位。
关键词: 微位移; 精密光学测量; 压电陶瓷; 反馈控制; 移相器; 干涉
0 引言
采用电致伸缩或磁致伸缩原理,在外部电磁场作用下,产生微米级、纳米级位移定位,并在一定的负载下线性稳定伸缩,由此构成的微位移装置,在细胞注射、光学精密调焦、光纤耦合、精密数控机床、大规模集成电路制造、精密光学测量等领域,均有着广泛的需求与应用价值。
国内外研究人员利用双频激光干涉或激光外腔干涉技术可以获得纳米量级的微位移传感[1-2],本文所述的微位移装置主要聚焦在采用压电陶瓷的逆压电效应,由驱动电压致使压电陶瓷机构产生微米、纳米量级的伸缩,可以推动一定质量的负载,保持稳定线性移动的部件机构。
压电陶瓷( Piezoelectric Ceramic Transducer,PZT) ,是一种锆钛酸铝材料。因其材料稳定、成本低廉、控制简便、响应频率高,在精密控制定位方面早就被广泛研究和应用。20 世纪 70 年代被用作移相器,形成移相干涉技术[3],极大地推动了移相( 也称相移,phase-shifted) 干涉仪向高精度、数字化、智能化测试设备方向的发展。因 PZT 装置能承载较高重量的负载,因此也是主动光学或自适应光学中驱动变形镜的主要部件[4]。德国 Physik Instrumente Gmb-Hg 公司在 PZT 位置传感器方面拥有较好的技术储备和产品。国内在 PZT微位移装置方面,从微位移测量、驱动源设计到位移反馈控制和放大等技术有很多的研究报道[5-9],体现出PZT 微位移装置的研究价值和重要应用。
本文主要总结了将 PZT 微位移装置用作干涉仪移相器,以及对其伸长量的测量技术、在线自适应标定和自反馈控制方面的研究成果。
1 测量压电陶瓷微位移的电脑接触式干涉仪
电脑接触式干涉仪[10]基于典型的 Michelson 白光等光程干涉仪原理,改用包含 CCD 在内的数字图像接收光学系统替代目视系统,将被测 PZT 放置在 Michelson 干涉仪的测量臂上,如图 1 所示。测量原理如下: 当 PZT 在外加电压作用下伸长或缩短时,与测头固连的测试反射镜,被测头下的 PZT 推动,对应的白光干涉条纹将在 CCD 靶面上扫描,根据扫过的像素数量可以计算出 PZT 的伸缩量。为了知道每一个CCD 像素代表的位移量,需要用具有一定数量、经过干涉滤光片的准单色光干涉条纹标定 CCD 像素。具体方法是: 将白光光源发出的光束通过干涉滤光片,使参考反射镜微量倾斜,与测试反射镜之间存在合适的角度,此时在 CCD 靶面上采集得到等间隔直纹,如图 2 所示。每一个条纹间距对应光程差为 λ/2( λ为干涉滤光片的工作波长) ,再经过数字图像处理技术,对条纹间距做细分,提高 CCD 像素对应的位移量标定精度。

图 1 电脑接触式干涉仪原理光路
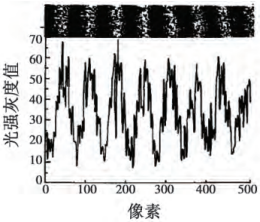
图 2 CCD 靶面上的等间隔直纹
按照此测量方法可以得到 PZT的伸长量数据,图 3 是用电脑接触式干涉仪测量得到的某一样品 PZT的伸长量随电压的变化关系曲线,图 4 是同一样品 PZT 的迟滞回线。
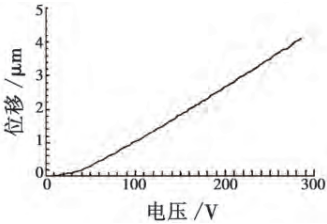
图 3 某一样品 PZT 的伸长量随电压的变化关系曲线
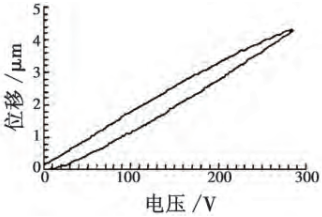
图 4 同一样品 PZT 的迟滞回线
电脑接触式干涉仪对 PZT 微位移的测量,方法简便、快速,可用于PZT 器件制作阶段,也可用于对外购PZT 微位移装置伸缩量的验证测量。
2 压电陶瓷移相器的 FFT 在线测量标定技术
用 PZT 制成的移相器,具有性能稳定、成本低廉、承担负载大、重复性优良等特点,20 世纪 90 年代被用到移相式数字波面干涉仪中,实现了波像差数据高精度的自动测量,在250 mm 以下口径的干涉系统中获得广泛的应用。
图 5 是数字波面干涉仪中的典型原理图,其中,黑框是干涉仪的主机本体,PZT 移相器安装在干涉仪的光路出口,用于推动参考反射镜产生移相。数字波面干涉仪用于测量光学元件的反射波前、透射波前或者光学材料的光学均匀性,这些信息隐藏在测试反射镜与参考反射镜返回的双波前产生的干涉条纹图中,是一种固定空间相位分布。为了能够快速得到这些固定相位分布,PZT移相器以连续伸长的方式,在固定的伸长间隔( 或步长) ,如 λ/8( λ 为干涉仪工作波长) 平移推动参考反射镜,每移动 λ/8,将在参考光路中引入π/2 相位,引起相应的干涉图像条纹移动,同步采集多幅干涉图,即可计算出被测的固定相位分布。

图 5 应用 PZT 移相器的数字波面干涉仪典型原理
典型的四步移相技术,可以用式(1) ~ 式(5) 表示,其中 Ii ( x,y) ( i =1,2,3,4) 为四步移相对应的干涉条纹光强分布函数,a( x,y) 为背景光强,b( x,y) 为干涉条纹调制度函数,φ( x,y) 为被测的固定相位分布。
I1( x,y) = a( x,y) + b( x,y) cos φ( x,y) (1)
I2 ( x,y) = a( x,y) + b( x,y) cos( φ( x,y) + π/2) (2)
I3 ( x,y) = a( x,y) + b( x,y) cos( φ( x,y) + π) (3)
I4 ( x,y) = a( x,y) + b( x,y) cos( φ( x,y) + 3π/2) (4)
联立式(1) ~ 式(4) ,可以求得被测固定相位函数 φ( x,y) 为

由四步移相法准确获取被测相位函数φ( x,y) 的关键,需使 PZT 移相器每一步伸长量为 λ/8,若超过或者小 于 λ/8,式 ( 5 ) 就 不 成 立。由PZT 一般特性和图 3 的位移 - 电压曲线结果,可知线性增加的电压,得到的位移量是非线性的; 为了实现每一步伸长量为 λ/8,即四步移相的伸长量相差分别为 0,λ/8,λ/4,3λ/8,则需要计算出正确的非线性电压值。
由于 PZT 移相器有、无负载状态的伸缩特性是不一样的,电脑接触式干涉仪测量的 PZT 伸长量是无负载状态下的。当用 PZT 移相器推动参考反射镜及其机械调节装置做微位移时,负载产生变化,其伸长量也产生变化。同时,根据测试功能需要,还会将参考反射镜换成其他标准附件( 如透射齐明透镜) ,用于测量透镜系统的波像差,此时 PZT 移相器的负载又变了。从提高数字波面干涉仪的实用性、稳定性角度考虑,希望根据不同负载,快速在线标定 PZT 移相器的位移特性,确保在不同负载下,都能实现每步 λ/8 的移相量。
可以借助于干涉仪自身的干涉条纹,可以是参考反射镜与测试反射镜、或者透射齐明透镜与球面测试反射镜之间产生的干涉条纹,当 PZT 移相器伸长时,干涉条纹将产生扫描,根据扫描条纹之间的相对变化,可在线得到 PZT 移相器的伸长位移曲线数据。现有在线标定技术有两种: 一种是空间载频快速傅里叶变换( FFT)技术,人为引入空间载频( 让参考波面与测试波面之间存在较小角度) ,增加干涉图中条纹数量,通过 FFT 技术,获取每一幅载频条纹图的相位信息,进而计算得到 PZT 的伸长量; 另一种是时间载频 FFT 技术,即尽量让参考波面与测试波面平行,减少干涉条纹数量,在 PZT 伸长致条纹扫描的过程中,采集每一像素在时间轴上的光强数据,通过 FFT 技术,同样可以得到 PZT 的伸长量。
2.1 空间载频 FFT 在线标定技术
2.1.1 PZT 移相器伸长量在线测量技术
一幅载频条纹图的光强函数可表示为
I( x,y,t) = a( x,y) + b( x,y) cos{ φ( x,y) + 2πf0[xcos θ + ysin θ]+ ψ( t) } (6)
式中: f0 为空间载频,是单位长度上干涉条纹数目的倒数; θ 表示干涉图中载频条纹方向与 x 轴的夹角,如图6 所示; ψ( t) 表示由 PZT 移相器推动参考反射镜或标准齐明透镜引入的相位变化,是空间载频 FFT 处理技术需要提取的量。
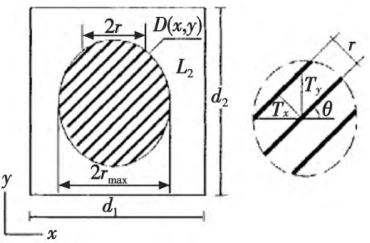
图 6 含载频的干涉图及条纹方位示意
这里的变量是代表像素位置的( x,y) ,不考虑时间 t,将式(6) 改写成复数形式,即
I'( x,y) = a( x,y) + c( x,y) exp[2πjf0 ( xcosθ + ysinθ) ]+c( x,y) exp[-2πjf0 ( xcosθ + ysinθ) ] (7)
式中,![]() ,c( x,y) = ( 1 /2) b( x,y) exp{ j[φ( x,y) + ψ( t) ]} 。
,c( x,y) = ( 1 /2) b( x,y) exp{ j[φ( x,y) + ψ( t) ]} 。
对式(7) 做二维 FFT 得
i'( u,v) = A( u,v) + C( u - f0cos θ,v - f0sin θ) + C( u + f0cos θ,v +f0sin θ) (8)
上式的傅里叶变换结果如图 7 所示。
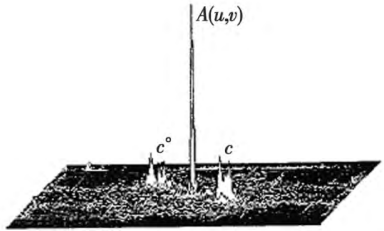
图 7 傅里叶变换结果
被测 ψ( t) 隐含在式( 8) 的第二项或第三项中。第一项为零频项,第二项、第三项是以零频项对称的载频项。利用恰当的滤波窗,取出第二项,移频处理得到 C( u,v) ,再做逆傅里叶变换得
F-1[C( u,v) ]= ( 1 /2) b( x,y) exp{ j[φ( x,y) + ψ( t) ]} (9)
由此得

式中,φ( x,y) 为固定相位分布,不随PZT 移相器外加驱动电压变化,相当于一个常数。因此只有 ψ( t) 与 PZT移相器伸长量有关,通过
L( t) = ( λ/2π) ψ( t) ( 11)
可以得到 PZT 移相器的伸长量 L( t) 。
2.1.2 PZT 移相器标定技术
根据前述,受 PZT 移相器的特性限制,如果外加的驱动电压等间隔增加,其产生的伸长量将是非线性增加的; 所谓 PZT 移相器标定技术,就是通过其固有的电压 - 位移变化关系数据( 已被测量知道) ,求解出非线性增加的驱动电压,使之产生等间隔( 如 λ /8) 增加的伸长量。
一般地,PZT 伸长量 L( t) 随着电压的变化关系,可以用非线性二次方程表示为
L( t) = A + BV( t) + C[V( t) ]² (12)
省略时间 t,式( 12) 变为
L = A + BV + CV² (13)
将据式( 11) 得到的 PZT 移相器伸长量 L( t) 与外加电压 V( t) 之间的数据,用式(13) 拟合,可以得到 A,B,C系数,这样根据要求的伸长量 L0 ( 可分别 为 0,λ/8,λ/4,3λ/8) ,可由式(14) 求取此时的驱动电压数值,即

此时,已经完成了 PZT 移相器的驱动电压标定,标定结果如图 8 所示,以非线性的外加驱动电压实现线性且等步长的位移( 0,λ/8,λ/4,3λ/8) 。

图 8 PZT 移相器非线性驱动电压的标定结果
2.2 时间载频 FFT 在线标定技术
2.1 节所述的在线标定方法属于先验标定,以后就用标定好的电压与微位移关系来驱动移相进行每一次测量,该方法适用于抗干扰性
强、性能稳定的移相器场合。时间载频 FFT 在线标定技术无需引入人为的条纹载频,条纹图样跟实际测量时一样,干涉条纹数量尽量少( 高精度测量要求时,一般少于 3 根) 。
2.2.1 PZT 移相器伸长量在线测量技术
基本方法是: 选择干涉 图 像 中单一特征点( 对应于某个像素) 的光强,当驱动电压等分增加,记录下该点的光强变化数据,外加电压驱动的伸长量较长时,将有多根条纹中心扫过该点,因此该点的光强与外加电压的关系也为余弦曲线。
因驱动电压由小到大变化需要一定的时间,特征点的光程采集是在该时间段完成,算法所使用的数学表达同式( 6) ~ 式( 11) ,只是此时的空间坐标( x,y) 不再是变量,而是CCD 靶面上选定的具有某一光强特征的像素位置,变量是外加电压对应的时间 t,所以称该法为时域傅里叶变化法。
为了使伸长量测量结果重复性好、避免噪声影响,一般选取至少 3个特征点,常见的特征点选取方法如图 9 所示。

图 9 特征点选取方法
3 个特点分别为干涉图有效区域中经中值滤波后的最大光强值、最小光强值和平均光强值所对应的空间位置( 一般为像素点坐标) ,如
图 10 所示。

图 10 特征点所对应的空间位置
时域载频 PZT 伸长量在线测量方法,在空间上只需要几个特征点( 一般取 3 点) ,数据量小、测量速度快,常被用于移相干涉技术中的移相量预测量与标定,在现有商用数字波面干涉仪中具有广泛应用。图11 给出了这种测量方法的测量曲线,在伸长量达 45 μm 的情况下,测量时间小于 1 s,远小于图 3 所示小伸长量的测量时间。

图 11 时域载频技术测量大伸长量的测量结果
2.2.2 PZT 移相器标定
得到了 PZT 伸长量随外加电压的变化曲线后,标定得到等步长的位移( 0,λ/8,λ/4,3λ /8) 的方法与2.1 节相同。
3 PZT 精密位移的反馈控制技术
前文所述方法是利用干涉仪的条纹移动信息,预先得出移相器的伸长量和电压 - 位移曲线,在下一次正式移相干涉测量时,采用校正好的驱动电压,获得四步移相需要的 PZT 移相器的微位移。本节将讨论一种更直接的办法,即引入微位移传感器直接实时测量出 PZT 的伸长量,将计算机、PZT 控制与驱动电路、PZT 移相器以及微位移传感器构成一个闭环反馈控制系统。闭环控制可以清楚地反馈移相器的移相量,提高整体的移相精度。
微位移传感器是一类将微小位移量转化成其他可测物理量的传感器件,典型器件有应变式位移传感器、线性可变差动变压器( Linear Variable Differential Transformer,LVDT) 、平板式电容传感器等。
图 12 给出了利用平板电容作为位移反馈元件的 PZT 微位移控制反馈原理。
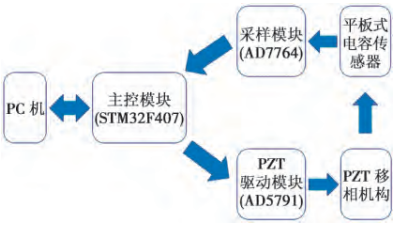
图 12 PZT 微位移控制反馈原理
图 12 中,PZT 微位移反馈系统由三部分组成,即电容传感器模块、PZT 驱动模块、PC 与主控模块。其中,电容传感器模块由采样模块与电容电极构成,通过电容变化量来计算 PZT 的伸长量。由主控模块控制 PZT 的伸长,并通过电容传感器的测量值修正主控模块的输出量,以完成整个反馈流程。
图 13 给出了电容电极与PZT微位移 机 构 的 安 装 实 物 照 片。在PZT 伸长方向平行位置,安装电容固定电极与动电极。参考( 反射) 镜可以与干涉仪连接,可将电容位移传感器的结果与干涉测量结果比对。
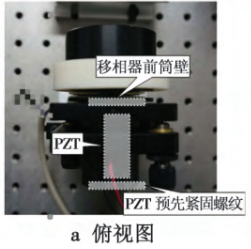

图 13 电容传感器在 PZT 移相器上的安装照片
图 14 给出了反馈控制情况下的位移 - 电压曲线,将 PZT 的非线性,由不反馈时的 3. 39% 提高到反馈时的 0. 78% 。实验表明: 该传感器具有优于 10 nm 的分辨精度,在20 μm 满量程范围内达到 1. 39% 非线性度。为高精度的定位场合,如光纤耦合定位、1 μm 针孔的点衍射定位等奠定了技术基础。
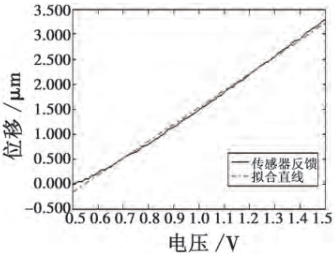
图 14 PZT 反馈时的电压 - 位移曲线
4 结论
本文围绕压电陶瓷制成的微位移装置,作为干涉系统移相器,详细阐述了所涉及到的微位移测量与相位标定、高精度的反馈控制技术。通过电脑接触式干涉仪对压电陶瓷堆的微位移测量,可以选择线性好、没有奇异定位缺陷的 PZT 作为移相器; 应用空间载频 FFT 测量方法,可以实现不同负载情况下的移相器在线标定; 通过时域载频 FFT 技术,可以实现不同负载、不同测量环境下,对 PZT 移相器的快速相位标定。高精度的反馈控制技术,利用平板式电容作为位移反馈器件,能够实现精密的位移定位,10 nm 的位移定位分辨率,在精密移相、光纤耦合定位、1 μm 针孔衍射定位等方面具有广泛的应用价值。
声明:本文由 CERADIR 先进陶瓷在线平台的入驻企业/个人提供或自网络获取,文章内容仅代表作者本人,不代表本网站及 CERADIR 立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。
{kind=link}
{kind=link}